2 D寸法
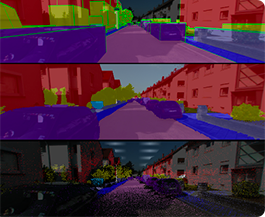
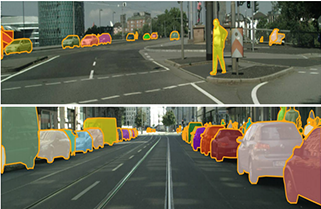
2 Dマークアップには、バウンディングボックス、多角形、意味分割、ターゲット追跡の4つの部分が含まれている。



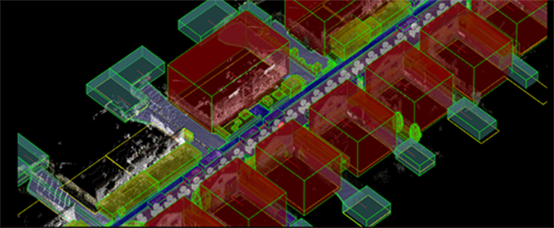
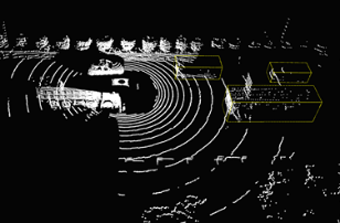









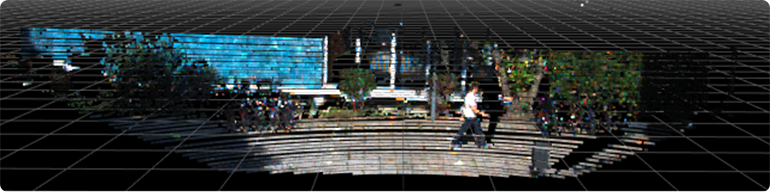
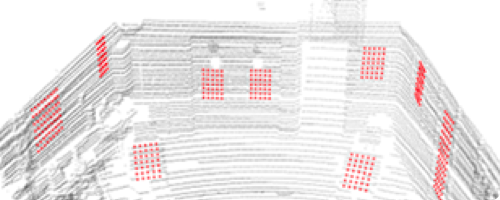
3 D点群表示プラットフォームはSurfingTechによって開発され、所有されている。これには、離散画像注記とビデオシーケンス注記の2つのバージョンがある。
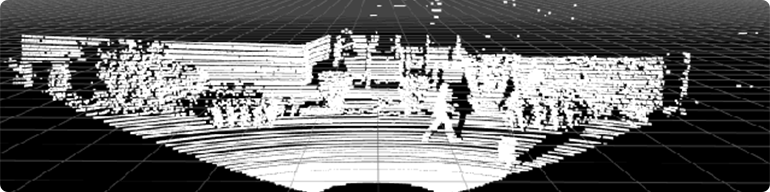
離散イメージとは、時系列に接続されていない単一フレームの点群データのことです。各フレームイメージには、以下のようなラベルを付ける必要があります。通常、1フレームの画像では点の数が足りないので、2次元画像の色を3次元点群データの対応する点に投影しなければならない。また、ラベル付け作業者は、ラベル付けを完了するために2Dイメージを参照する必要がある。
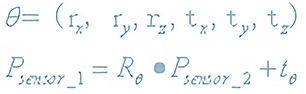
シーンベースのビデオシーケンスのラベル付けでは、最初にフレーム間の連続性を使用して3Dシーンをリファクタリングし、次に3Dシーンでラベル付けを行う。2次元画像の各フレームと点群データに寸法を投影して寸法結果を形成する。